dstep#
- scipy.signal.dstep(system, x0=None, t=None, n=None)[source]#
Step response of discrete-time system.
- Parameters:
- systemdlti | tuple
An instance of the LTI class
dltior a tuple describing the system. The number of elements in the tuple determine the interpretation. I.e.:system: Instance of LTI classdlti. Note that derived instances, such as instances ofTransferFunction,ZerosPolesGain, orStateSpace, are allowed as well.(num, den, dt): Rational polynomial as described inTransferFunction. The coefficients of the polynomials should be specified in descending exponent order, e.g., z² + 3z + 5 would be represented as[1, 3, 5].(zeros, poles, gain, dt): Zeros, poles, gain form as described inZerosPolesGain.(A, B, C, D, dt): State-space form as described inStateSpace.
- x0array_like, optional
Initial state-vector. Defaults to zero.
- tarray_like, optional
Time points. Computed if not given.
- nint, optional
The number of time points to compute (if t is not given).
- Returns:
- toutndarray
Output time points, as a 1-D array.
- youttuple of ndarray
Step response of system. Each element of the tuple represents the output of the system based on a step response to each input.
See also
Examples
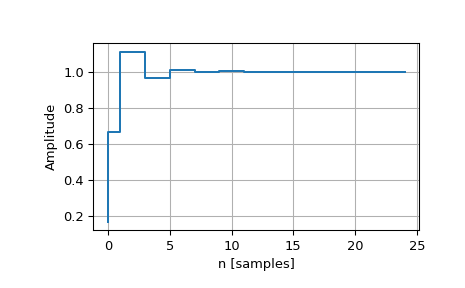
The following example illustrates how to create a digital Butterworth filer and plot its step response:
>>> import numpy as np >>> from scipy import signal >>> import matplotlib.pyplot as plt ... >>> dt = 1 # sampling interval is one => time unit is sample number >>> bb, aa = signal.butter(3, 0.25, fs=1/dt) >>> t, y = signal.dstep((bb, aa, dt), n=25) ... >>> fig0, ax0 = plt.subplots() >>> ax0.step(t, np.squeeze(y), '.-', where='post') >>> ax0.set_title(r"Step Response of a $3^\text{rd}$ Order Butterworth Filter") >>> ax0.set(xlabel='Sample number', ylabel='Amplitude', ylim=(0, 1.1*np.max(y))) >>> ax0.grid() >>> plt.show()