BSpline#
- class scipy.interpolate.BSpline(t, c, k, extrapolate=True, axis=0)[source]#
Univariate spline in the B-spline basis.
\[S(x) = \sum_{j=0}^{n-1} c_j B_{j, k; t}(x)\]where \(B_{j, k; t}\) are B-spline basis functions of degree
kand knotst.- Parameters:
- tndarray, shape (n+k+1,)
knots
- cndarray, shape (>=n, …)
spline coefficients
- kint
B-spline degree
- extrapolatebool or ‘periodic’, optional
whether to extrapolate beyond the base interval,
t[k] .. t[n], or to return nans. If True, extrapolates the first and last polynomial pieces of b-spline functions active on the base interval. If ‘periodic’, periodic extrapolation is used. Default is True.- axisint, optional
Interpolation axis. Default is zero.
- Attributes:
- tndarray
knot vector
- cndarray
spline coefficients
- kint
spline degree
- extrapolatebool
If True, extrapolates the first and last polynomial pieces of b-spline functions active on the base interval.
- axisint
Interpolation axis.
tcktupleEquivalent to
(self.t, self.c, self.k)(read-only).
Methods
__call__(x[, nu, extrapolate])Evaluate a spline function.
basis_element(t[, extrapolate])Return a B-spline basis element
B(x | t[0], ..., t[k+1]).derivative([nu])Return a B-spline representing the derivative.
antiderivative([nu])Return a B-spline representing the antiderivative.
integrate(a, b[, extrapolate])Compute a definite integral of the spline.
insert_knot(x[, m])Insert a new knot at x of multiplicity m.
construct_fast(t, c, k[, extrapolate, axis])Construct a spline without making checks.
design_matrix(x, t, k[, extrapolate])Returns a design matrix as a CSR format sparse array.
from_power_basis(pp[, bc_type])Construct a polynomial in the B-spline basis from a piecewise polynomial in the power basis.
Notes
B-spline basis elements are defined via
\[ \begin{align}\begin{aligned}B_{i, 0}(x) = 1, \textrm{if $t_i \le x < t_{i+1}$, otherwise $0$,}\\B_{i, k}(x) = \frac{x - t_i}{t_{i+k} - t_i} B_{i, k-1}(x) + \frac{t_{i+k+1} - x}{t_{i+k+1} - t_{i+1}} B_{i+1, k-1}(x)\end{aligned}\end{align} \]Implementation details
At least
k+1coefficients are required for a spline of degreek, so thatn >= k+1. Additional coefficients,c[j]withj > n, are ignored.B-spline basis elements of degree
kform a partition of unity on the base interval,t[k] <= x <= t[n].
Array API Standard Support
BSplinehas experimental support for Python Array API Standard compatible backends in addition to NumPy. Please consider testing these features by setting an environment variableSCIPY_ARRAY_API=1and providing CuPy, PyTorch, JAX, or Dask arrays as array arguments. The following combinations of backend and device (or other capability) are supported.Library
CPU
GPU
NumPy
✅
n/a
CuPy
n/a
✅
PyTorch
✅
⛔
JAX
⚠️ no JIT
⛔
Dask
⛔
n/a
The methods
design_matrixandfrom_power_basisare currently NumPy only.insert_knotis currently not supported with CuPy.If the spline is called on an array
xwith namespace different from the namespacexpof the knotstand coefficientsc, an attempt will be made to coercexto thexpnamespace. Mixing namespaces in this way is not recommended.See Support for the array API standard for more information.
References
[1]Michael Floater, An introduction to spline theory, 2025, https://www.uio.no/studier/emner/matnat/math/MAT4170/v25/undervisningsmateriale/spline_notes.pdf
[2]Carl de Boor, A practical guide to splines, Springer, 2001.
Examples
Translating the recursive definition of B-splines into Python code, we have:
>>> def B(x, k, i, t): ... if k == 0: ... return 1.0 if t[i] <= x < t[i+1] else 0.0 ... if t[i+k] == t[i]: ... c1 = 0.0 ... else: ... c1 = (x - t[i])/(t[i+k] - t[i]) * B(x, k-1, i, t) ... if t[i+k+1] == t[i+1]: ... c2 = 0.0 ... else: ... c2 = (t[i+k+1] - x)/(t[i+k+1] - t[i+1]) * B(x, k-1, i+1, t) ... return c1 + c2
>>> def bspline(x, t, c, k): ... n = len(t) - k - 1 ... assert (n >= k+1) and (len(c) >= n) ... return sum(c[i] * B(x, k, i, t) for i in range(n))
Note that this is an inefficient (if straightforward) way to evaluate B-splines — this spline class does it in an equivalent, but much more efficient way.
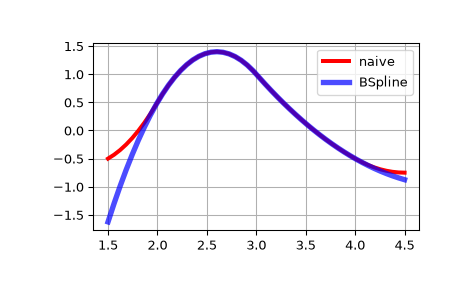
Here we construct a quadratic spline function on the base interval
2 <= x <= 4and compare with the naive way of evaluating the spline:>>> from scipy.interpolate import BSpline >>> k = 2 >>> t = [0, 1, 2, 3, 4, 5, 6] >>> c = [-1, 2, 0, -1] >>> spl = BSpline(t, c, k) >>> spl(2.5) array(1.375) >>> bspline(2.5, t, c, k) 1.375
Note that outside of the base interval results differ. This is because
BSplineextrapolates the first and last polynomial pieces of B-spline functions active on the base interval.>>> import matplotlib.pyplot as plt >>> import numpy as np >>> fig, ax = plt.subplots() >>> xx = np.linspace(1.5, 4.5, 50) >>> ax.plot(xx, [bspline(x, t, c ,k) for x in xx], 'r-', lw=3, label='naive') >>> ax.plot(xx, spl(xx), 'b-', lw=4, alpha=0.7, label='BSpline') >>> ax.grid(True) >>> ax.legend(loc='best') >>> plt.show()