Attachment 'tutorial_lokta-voltera_v4.py'
Download 1 # This example describe how to integrate ODEs with scipy.integrate module, and how
2 # to use the matplotlib module to plot trajectories, direction fields and other
3 # useful information.
4 #
5 # == Presentation of the Lokta-Volterra Model ==
6 #
7 # We will have a look at the Lokta-Volterra model, also known as the
8 # predator-prey equations, which are a pair of first order, non-linear, differential
9 # equations frequently used to describe the dynamics of biological systems in
10 # which two species interact, one a predator and one its prey. They were proposed
11 # independently by Alfred J. Lotka in 1925 and Vito Volterra in 1926:
12 # du/dt = a*u - b*u*v
13 # dv/dt = -c*v + d*b*u*v
14 #
15 # with the following notations:
16 #
17 # * u: number of preys (for example, rabbits)
18 #
19 # * v: number of predators (for example, foxes)
20 #
21 # * a, b, c, d are constant parameters defining the behavior of the population:
22 #
23 # + a is the natural growing rate of rabbits, when there's no fox
24 #
25 # + b is the natural dying rate of rabbits, due to predation
26 #
27 # + c is the natural dying rate of fox, when there's no rabbit
28 #
29 # + d is the factor describing how many caught rabbits let create a new fox
30 #
31 # We will use X=[u, v] to describe the state of both populations.
32 #
33 # Definition of the equations:
34 #
35 from numpy import *
36 import pylab as p
37
38 # Definition of parameters
39 a = 1.
40 b = 0.1
41 c = 1.5
42 d = 0.75
43
44 def dX_dt(X, t=0):
45 """ Return the growth rate of fox and rabbit populations. """
46 return array([ a*X[0] - b*X[0]*X[1] ,
47 -c*X[1] + d*b*X[0]*X[1] ])
48 #
49 # === Population equilibrium ===
50 #
51 # Before using !SciPy to integrate this system, we will have a closer look on
52 # position equilibrium. Equilibrium occurs when the growth rate is equal to 0.
53 # This gives two fixed points:
54 #
55 X_f0 = array([ 0. , 0.])
56 X_f1 = array([ c/(d*b), a/b])
57 all(dX_dt(X_f0) == zeros(2) ) and all(dX_dt(X_f1) == zeros(2)) # => True
58 #
59 # === Stability of the fixed points ===
60 # Near theses two points, the system can be linearized:
61 # dX_dt = A_f*X where A is the Jacobian matrix evaluated at the corresponding point.
62 # We have to define the Jacobian matrix:
63 #
64 def d2X_dt2(X, t=0):
65 """ Return the Jacobian matrix evaluated in X. """
66 return array([[a -b*X[1], -b*X[0] ],
67 [b*d*X[1] , -c +b*d*X[0]] ])
68 #
69 # So, near X_f0, which represents the extinction of both species, we have:
70 # A_f0 = d2X_dt2(X_f0) # >>> array([[ 1. , -0. ],
71 # # [ 0. , -1.5]])
72 #
73 # Near X_f0, the number of rabbits increase and the population of foxes decrease.
74 # The origin is a [http://en.wikipedia.org/wiki/Saddle_point saddle point].
75 #
76 # Near X_f1, we have:
77 A_f1 = d2X_dt2(X_f1) # >>> array([[ 0. , -2. ],
78 # [ 0.75, 0. ]])
79
80 # whose eigenvalues are +/- sqrt(c*a).j:
81 lambda1, lambda2 = linalg.eigvals(A_f1) # >>> (1.22474j, -1.22474j)
82
83 # They are imaginary number, so the fox and rabbit populations are periodic and
84 # their period is given by:
85 T_f1 = 2*pi/abs(lambda1) # >>> 5.130199
86 #
87 # == Integrating the ODE using scipy.integate ==
88 #
89 # Now we will use the scipy.integrate module to integrate the ODEs.
90 # This module offers a method named odeint, very easy to use to integrate ODEs:
91 #
92 from scipy import integrate
93
94 t = linspace(0, 15, 1000) # time
95 X0 = array([10, 5]) # initials conditions: 10 rabbits and 5 foxes
96
97 X, infodict = integrate.odeint(dX_dt, X0, t, full_output=True)
98 infodict['message'] # >>> 'Integration successful.'
99 #
100 # `infodict` is optional, and you can omit the `full_output` argument if you don't want it.
101 # Type "info(odeint)" if you want more information about odeint inputs and outputs.
102 #
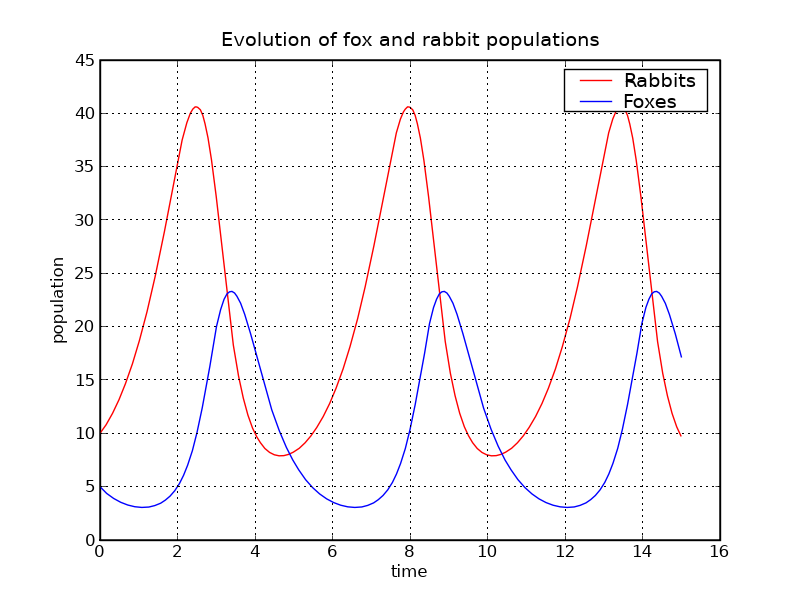
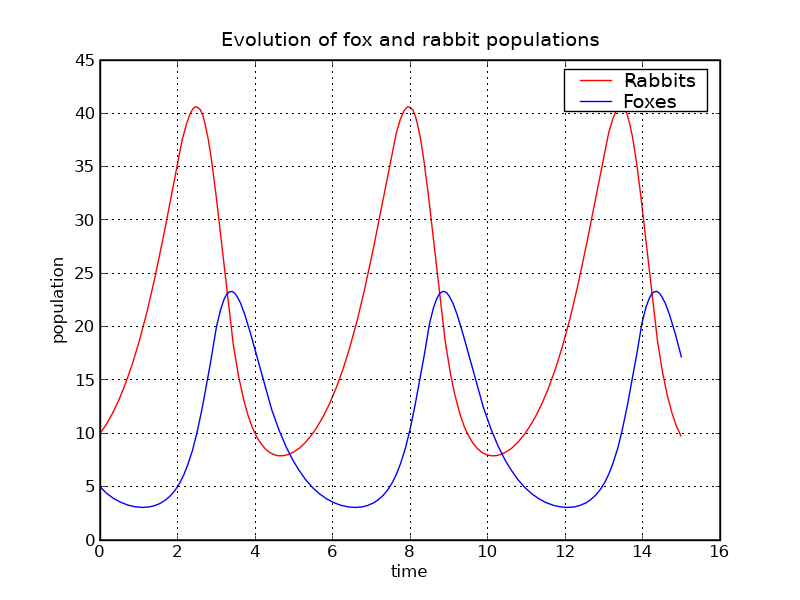
103 # We can now use Matplotlib to plot the evolution of both populations:
104 #
105 rabbits, foxes = X.T
106
107 f1 = p.figure()
108 p.plot(t, rabbits, 'r-', label='Rabbits')
109 p.plot(t, foxes , 'b-', label='Foxes')
110 p.grid()
111 p.legend(loc='best')
112 p.xlabel('time')
113 p.ylabel('population')
114 p.title('Evolution of fox and rabbit populations')
115 f1.savefig('rabbits_and_foxes_1.png')
116 #
117 #
118 # The populations are indeed periodic, and their period is near to the T_f1 we calculated.
119 #
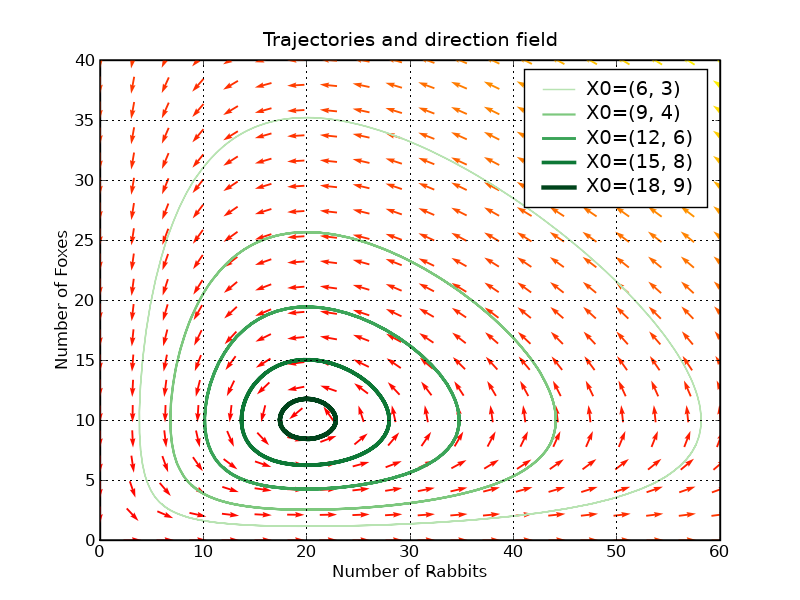
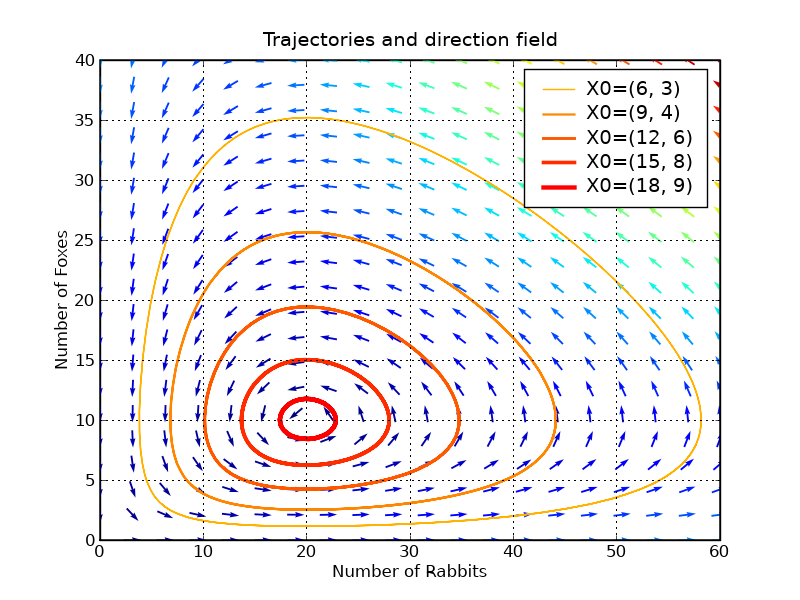
120 # == Plotting direction fields and trajectories in the phase plane ==
121 #
122 # We will plot some trajectories in a phase plane for different starting
123 # points between X__f0 and X_f1.
124 #
125 # We will use matplotlib's colormap to define colors for the trajectories.
126 # These colormaps are very useful to make nice plots.
127 # Have a look at [http://www.scipy.org/Cookbook/Matplotlib/Show_colormaps ShowColormaps] if you want more information.
128 #
129 values = linspace(0.3, 0.9, 5) # position of X0 between X_f0 and X_f1
130 vcolors = p.cm.autumn_r(linspace(0.3, 1., len(values))) # colors for each trajectory
131
132 f2 = p.figure()
133
134 #-------------------------------------------------------
135 # plot trajectories
136 for v, col in zip(values, vcolors):
137 X0 = v * X_f1 # starting point
138 X = integrate.odeint( dX_dt, X0, t) # we don't need infodict here
139 p.plot( X[:,0], X[:,1], lw=3.5*v, color=col, label='X0=(%.f, %.f)' % ( X0[0], X0[1]) )
140
141 #-------------------------------------------------------
142 # define a grid and compute direction at each point
143 ymax = p.ylim(ymin=0)[1] # get axis limits
144 xmax = p.xlim(xmin=0)[1]
145 nb_points = 20
146
147 x = linspace(0, xmax, nb_points)
148 y = linspace(0, ymax, nb_points)
149
150 X1 , Y1 = meshgrid(x, y) # create a grid
151 DX1, DY1 = dX_dt([X1, Y1]) # compute growth rate on the gridt
152 M = (hypot(DX1, DY1)) # Norm of the growth rate
153 M[ M == 0] = 1. # Avoid zero division errors
154 DX1 /= M # Normalize each arrows
155 DY1 /= M
156
157 #-------------------------------------------------------
158 # Drow direction fields, using matplotlib 's quiver function
159 # I choose to plot normalized arrows and to use colors to give information on
160 # the growth speed
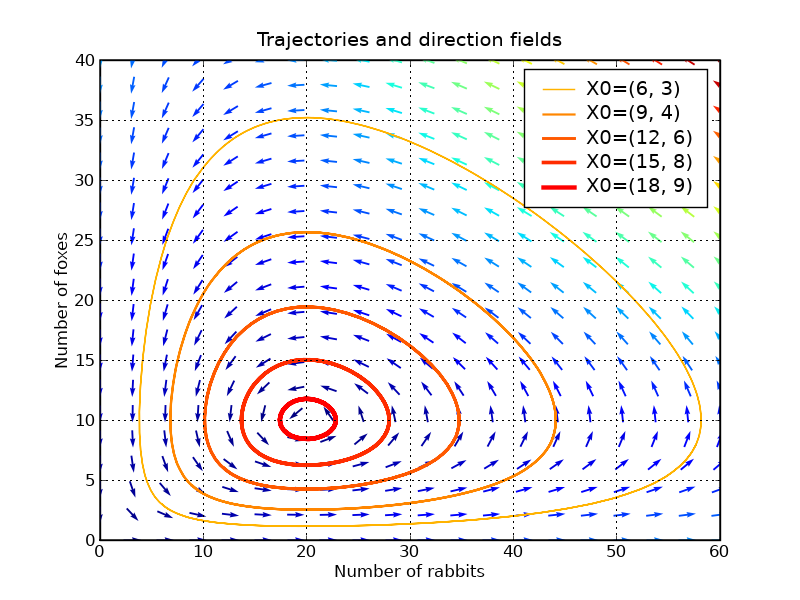
161 p.title('Trajectories and direction fields')
162 Q = p.quiver(X1, Y1, DX1, DY1, M, pivot='mid', cmap=p.cm.jet)
163 p.xlabel('Number of rabbits')
164 p.ylabel('Number of foxes')
165 p.legend()
166 p.grid()
167 p.xlim(0, xmax)
168 p.ylim(0, ymax)
169 f2.savefig('rabbits_and_foxes_2.png')
170 #
171 #
172 # We can see on this graph that an intervention on fox or rabbit populations can
173 # have non intuitive effects. If, in order to decrease the number of rabbits,
174 # we introduce foxes, this can lead to an increase of rabbits in the long run,
175 # if that intervention happens at a bad moment.
176 #
177 #
178 # == Plotting contours ==
179 #
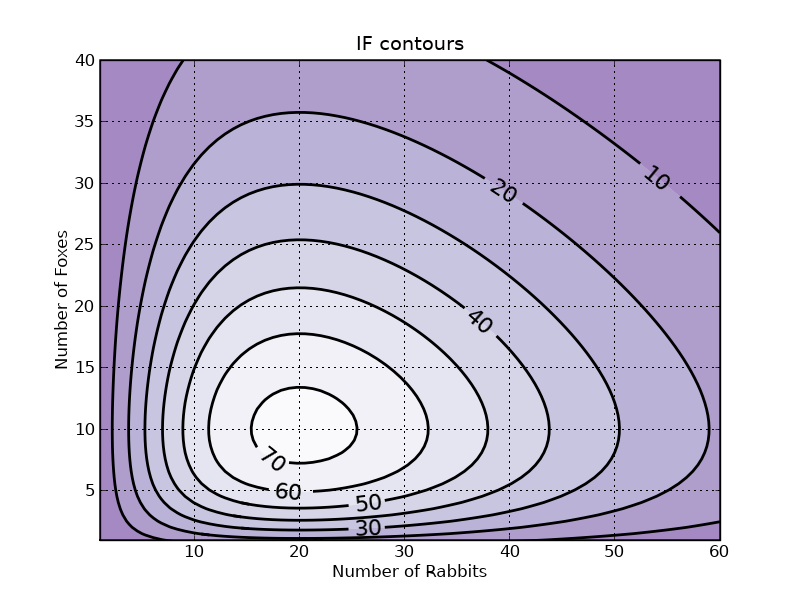
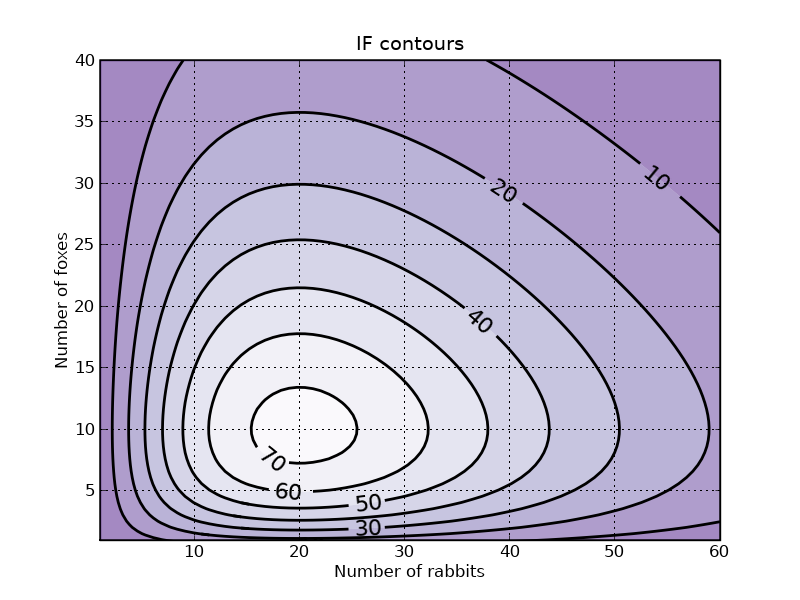
180 # We can verify that the function IF defined below remains constant along a trajectory:
181 #
182 def IF(X):
183 u, v = X
184 return u**(c/a) * v * exp( -(b/a)*(d*u+v) )
185
186 # We will verify that IF remains constant for different trajectories
187 for v in values:
188 X0 = v * X_f1 # starting point
189 X = integrate.odeint( dX_dt, X0, t)
190 I = IF(X.T) # compute IF along the trajectory
191 I_mean = I.mean()
192 delta = 100 * (I.max()-I.min())/I_mean
193 print 'X0=(%2.f,%2.f) => I ~ %.1f |delta = %.3G %%' % (X0[0], X0[1], I_mean, delta)
194
195 # >>> X0=( 6, 3) => I ~ 20.8 |delta = 6.19E-05 %
196 # X0=( 9, 4) => I ~ 39.4 |delta = 2.67E-05 %
197 # X0=(12, 6) => I ~ 55.7 |delta = 1.82E-05 %
198 # X0=(15, 8) => I ~ 66.8 |delta = 1.12E-05 %
199 # X0=(18, 9) => I ~ 72.4 |delta = 4.68E-06 %
200 #
201 # Potting iso-contours of IF can be a good representation of trajectories,
202 # without having to integrate the ODE
203 #
204 #-------------------------------------------------------
205 # plot iso contours
206 nb_points = 80 # grid size
207
208 x = linspace(0, xmax, nb_points)
209 y = linspace(0, ymax, nb_points)
210
211 X2 , Y2 = meshgrid(x, y) # create the grid
212 Z2 = IF([X2, Y2]) # compute IF on each point
213
214 f3 = p.figure()
215 CS = p.contourf(X2, Y2, Z2, cmap=p.cm.Purples_r, alpha=0.5)
216 CS2 = p.contour(X2, Y2, Z2, colors='black', linewidths=2. )
217 p.clabel(CS2, inline=1, fontsize=16, fmt='%.f')
218 p.grid()
219 p.xlabel('Number of rabbits')
220 p.ylabel('Number of foxes')
221 p.ylim(1, ymax)
222 p.xlim(1, xmax)
223 p.title('IF contours')
224 f3.savefig('rabbits_and_foxes_3.png')
225 p.show()
226 #
227 #
228 # # vim: set et sts=4 sw=4:
New Attachment
Attached Files
To refer to attachments on a page, use attachment:filename, as shown below in the list of files. Do NOT use the URL of the [get] link, since this is subject to change and can break easily.- [get | view] (2007-11-11 16:53:16, 54.4 KB) [[attachment:rabbits_and_foxes_1.png]]
- [get | view] (2007-11-11 20:37:46, 54.4 KB) [[attachment:rabbits_and_foxes_1v2.png]]
- [get | view] (2007-11-11 16:53:39, 131.6 KB) [[attachment:rabbits_and_foxes_2.png]]
- [get | view] (2007-11-11 17:43:42, 131.9 KB) [[attachment:rabbits_and_foxes_2v2.png]]
- [get | view] (2007-11-11 20:38:36, 131.6 KB) [[attachment:rabbits_and_foxes_2v3.png]]
- [get | view] (2007-11-11 16:54:58, 110.6 KB) [[attachment:rabbits_and_foxes_3.png]]
- [get | view] (2007-11-11 20:39:02, 110.5 KB) [[attachment:rabbits_and_foxes_3v2.png]]
- [get | view] (2007-11-11 17:04:20, 8.3 KB) [[attachment:tutorial_lokta-voltera.py]]
- [get | view] (2007-11-11 17:43:02, 8.4 KB) [[attachment:tutorial_lokta-voltera_v2.py]]
- [get | view] (2007-11-11 17:52:29, 8.3 KB) [[attachment:tutorial_lokta-voltera_v3.py]]
- [get | view] (2007-11-11 20:37:14, 8.3 KB) [[attachment:tutorial_lokta-voltera_v4.py]]
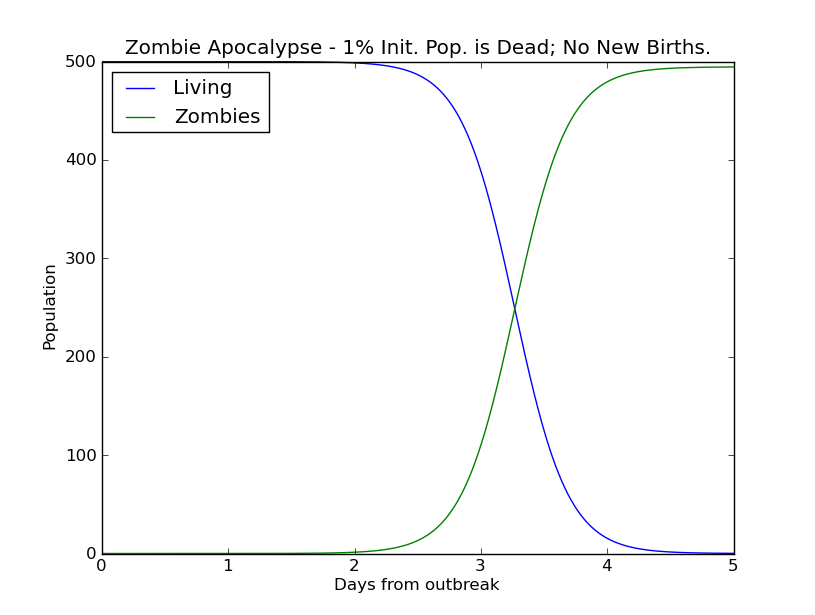
- [get | view] (2011-04-24 19:52:43, 38.7 KB) [[attachment:zombie_nodead_nobirths.png]]
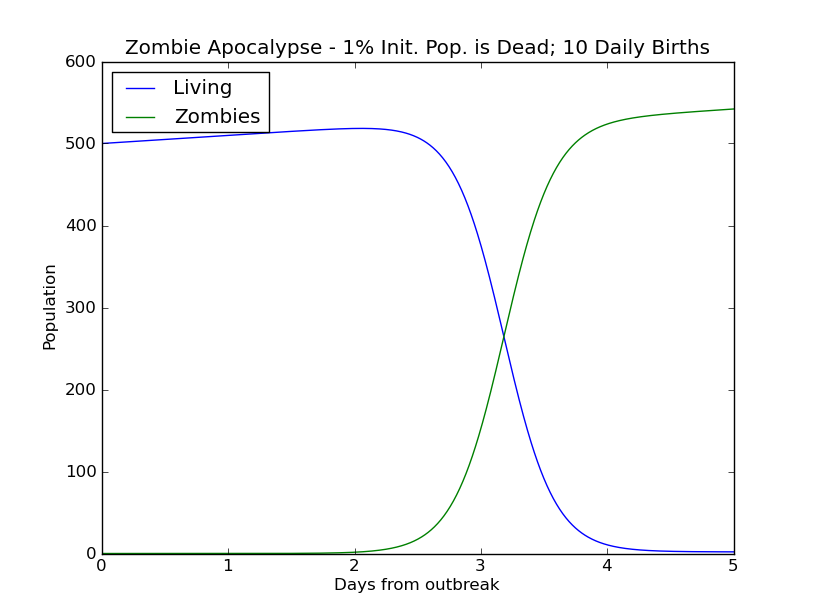
- [get | view] (2011-04-24 19:53:34, 42.4 KB) [[attachment:zombie_somedead_10births.png]]
- [get | view] (2011-04-24 19:53:17, 42.3 KB) [[attachment:zombie_somedead_nobirths.png]]
- [get | view] (2011-04-24 19:53:01, 42.3 KB) [[attachment:zombie_somedeaddead_nobirths.png]]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}