RK23#
- class scipy.integrate.RK23(fun, t0, y0, t_bound, max_step=inf, rtol=0.001, atol=1e-06, vectorized=False, first_step=None, **extraneous)[source]#
Explicit Runge-Kutta method of order 3(2).
This uses the Bogacki-Shampine pair of formulas [1]. The error is controlled assuming accuracy of the second-order method, but steps are taken using the third-order accurate formula (local extrapolation is done). A cubic Hermite polynomial is used for the dense output.
Can be applied in the complex domain.
- Parameters:
- funcallable
Right-hand side of the system: the time derivative of the state
yat timet. The calling signature isfun(t, y), wheretis a scalar andyis an ndarray withlen(y) = len(y0).funmust return an array of the same shape asy. See vectorized for more information.- t0float
Initial time.
- y0array_like, shape (n,)
Initial state.
- t_boundfloat
Boundary time - the integration won’t continue beyond it. It also determines the direction of the integration.
- max_stepfloat, optional
Maximum allowed step size. Default is np.inf, i.e., the step size is not bounded and determined solely by the solver.
- rtol, atolfloat and array_like, optional
Relative and absolute tolerances. The solver keeps the local error estimates less than
atol + rtol * abs(y). Here rtol controls a relative accuracy (number of correct digits), while atol controls absolute accuracy (number of correct decimal places). To achieve the desired rtol, set atol to be smaller than the smallest value that can be expected fromrtol * abs(y)so that rtol dominates the allowable error. If atol is larger thanrtol * abs(y)the number of correct digits is not guaranteed. Conversely, to achieve the desired atol set rtol such thatrtol * abs(y)is always smaller than atol. If components of y have different scales, it might be beneficial to set different atol values for different components by passing array_like with shape (n,) for atol. Default values are 1e-3 for rtol and 1e-6 for atol.- vectorizedbool, optional
Whether fun may be called in a vectorized fashion. False (default) is recommended for this solver.
If
vectorizedis False, fun will always be called withyof shape(n,), wheren = len(y0).If
vectorizedis True, fun may be called withyof shape(n, k), wherekis an integer. In this case, fun must behave such thatfun(t, y)[:, i] == fun(t, y[:, i])(i.e. each column of the returned array is the time derivative of the state corresponding with a column ofy).Setting
vectorized=Trueallows for faster finite difference approximation of the Jacobian by methods ‘Radau’ and ‘BDF’, but will result in slower execution for this solver.- first_stepfloat or None, optional
Initial step size. Default is
Nonewhich means that the algorithm should choose.- **extraneous
Any additional keyword arguments will be ignored.
- Attributes:
- nint
Number of equations.
- statusstr
Current status of the solver: ‘running’, ‘finished’ or ‘failed’.
- t_boundfloat
Boundary time.
- directionfloat
Integration direction: +1 or -1.
- tfloat
Current time.
- yndarray
Current state.
- t_oldfloat
Previous time. None if no steps were made yet.
- step_sizefloat
Size of the last successful step. None if no steps were made yet.
- nfevint
Number evaluations of the system’s right-hand side.
- njevint
Number of evaluations of the Jacobian. Is always 0 for this solver as it does not use the Jacobian.
- nluint
Number of LU decompositions. Is always 0 for this solver.
Methods
Compute a local interpolant over the last successful step.
step()Perform one integration step.
References
[1]P. Bogacki, L.F. Shampine, “A 3(2) Pair of Runge-Kutta Formulas”, Appl. Math. Lett. Vol. 2, No. 4. pp. 321-325, 1989.
Examples
This example demonstrates how to compute one period of a periodic orbit in a two-dimensional dynamical system.
>>> import numpy as np >>> import scipy.integrate as itg >>> import matplotlib.pylab as plt
Define a function that returns the right-hand side of a dynamical system with a stable periodic orbit.
>>> def dynam_sys(t, x): ... dx1_dt = 5*(1-x[1]**2)*x[0] - x[1] ... dx2_dt = x[0] ... return [dx1_dt, dx2_dt]
The system has an equilibrium at the origin. Create a solver object with an initial state slightly away from the equilibrium.
>>> solver = itg.RK45(dynam_sys, 0, [0.25,0.25], 1E200, max_step=0.05)
Create an array in which to store the estimated solution. To allow for concatenation of future states, initialize the array by reshaping the initial state.
>>> soly = solver.y.reshape(1, 2)
To find a point on the periodic orbit, run the solver for
2000integration steps. Store the estimated states insoly.>>> for i in range(2000): ... solver.step() ... solyn = solver.y.reshape(1, 2) ... soly = np.concatenate((soly, solyn))
Plot
solywith its first element in green and its final element in magenta.>>> plt.plot(soly[:,0], soly[:,1]) >>> plt.plot(soly[0,0], soly[0,1], "go") >>> plt.plot(soly[-1,0], soly[-1,1], "mo") >>> plt.show()
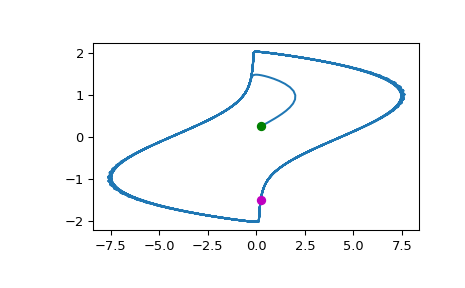
The plot shows that the last element in
solyis located on a segment of the periodic orbit where there is relatively little variation in the estimated states. Create another solver and initialize it with the last element insoly.>>> init = np.array([soly[-1,0], soly[-1,1]]) >>> POsolver = itg.RK23(dynam_sys, 0, init, 5000, max_step=0.05)
Create a variable that tracks the distance of the current estimated state from the initial state. Run
POsolveruntil the current estimated state is within0.005units of the last estimated state.>>> dist_init = 1 >>> POsoly = POsolver.y.reshape(1, 2) >>> while dist_init > 0.005: ... POsolver.step() ... POsolyn = POsolver.y.reshape(1, 2) ... POsoly = np.concatenate((POsoly, POsolyn)) ... dist_init = np.linalg.norm(init-POsolyn)
Plot
POsolywith its initial element in green and its final element in magenta.>>> plt.plot(POsoly[:,0], POsoly[:,1]) >>> plt.plot(POsoly[0,0], POsoly[0,1], "go") >>> plt.plot(POsoly[-1,0], POsoly[-1,1], "mo") >>> plt.show()
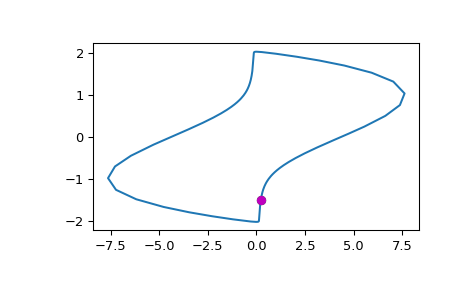
The plot shows approximately one period of the orbit. The final and initial states are so close that the final state marker obscures the initial state marker.