derivative#
- scipy.differentiate.derivative(f, x, *, args=(), tolerances=None, maxiter=10, order=8, initial_step=0.5, step_factor=2.0, step_direction=0, preserve_shape=False, callback=None)[source]#
Evaluate the derivative of an elementwise, real scalar function numerically.
For each element of the output of f,
derivativeapproximates the first derivative of f at the corresponding element of x using finite difference differentiation.This function works elementwise when x, step_direction, and args contain (broadcastable) arrays.
- Parameters:
- fcallable
The function whose derivative is desired. The signature must be:
f(xi: ndarray, *argsi) -> ndarray
where each element of
xiis a finite real number andargsiis a tuple, which may contain an arbitrary number of arrays that are broadcastable withxi. f must be an elementwise function: each scalar elementf(xi)[j]must equalf(xi[j])for valid indicesj. It must not mutate the arrayxior the arrays inargsi.- xfloat array_like
Abscissae at which to evaluate the derivative. Must be broadcastable with args and step_direction.
- argstuple of array_like, optional
Additional positional array arguments to be passed to f. Arrays must be broadcastable with one another and the arrays of init. If the callable for which the root is desired requires arguments that are not broadcastable with x, wrap that callable with f such that f accepts only x and broadcastable
*args.- tolerancesdictionary of floats, optional
Absolute and relative tolerances. Valid keys of the dictionary are:
atol- absolute tolerance on the derivativertol- relative tolerance on the derivative
Iteration will stop when
res.error < atol + rtol * abs(res.df). The default atol is the smallest normal number of the appropriate dtype, and the default rtol is the square root of the precision of the appropriate dtype.- orderint, default: 8
The (positive integer) order of the finite difference formula to be used. Odd integers will be rounded up to the next even integer.
- initial_stepfloat array_like, default: 0.5
The (absolute) initial step size for the finite difference derivative approximation.
- step_factorfloat, default: 2.0
The factor by which the step size is reduced in each iteration; i.e. the step size in iteration 1 is
initial_step/step_factor. Ifstep_factor < 1, subsequent steps will be greater than the initial step; this may be useful if steps smaller than some threshold are undesirable (e.g. due to subtractive cancellation error).- maxiterint, default: 10
The maximum number of iterations of the algorithm to perform. See Notes.
- step_directioninteger array_like
An array representing the direction of the finite difference steps (for use when x lies near to the boundary of the domain of the function.) Must be broadcastable with x and all args. Where 0 (default), central differences are used; where negative (e.g. -1), steps are non-positive; and where positive (e.g. 1), all steps are non-negative.
- preserve_shapebool, default: False
In the following, “arguments of f” refers to the array
xiand any arrays withinargsi. Letshapebe the broadcasted shape of x and all elements of args (which is conceptually distinct fromxi` and ``argsipassed into f).When
preserve_shape=False(default), f must accept arguments of any broadcastable shapes.When
preserve_shape=True, f must accept arguments of shapeshapeorshape + (n,), where(n,)is the number of abscissae at which the function is being evaluated.
In either case, for each scalar element
xi[j]withinxi, the array returned by f must include the scalarf(xi[j])at the same index. Consequently, the shape of the output is always the shape of the inputxi.See Examples.
- callbackcallable, optional
An optional user-supplied function to be called before the first iteration and after each iteration. Called as
callback(res), whereresis a_RichResultsimilar to that returned byderivative(but containing the current iterate’s values of all variables). If callback raises aStopIteration, the algorithm will terminate immediately andderivativewill return a result. callback must not mutate res or its attributes.
- Returns:
- res_RichResult
An object similar to an instance of
scipy.optimize.OptimizeResultwith the following attributes. The descriptions are written as though the values will be scalars; however, if f returns an array, the outputs will be arrays of the same shape.- successbool array
Truewhere the algorithm terminated successfully (status0);Falseotherwise.- statusint array
An integer representing the exit status of the algorithm.
0: The algorithm converged to the specified tolerances.-1: The error estimate increased, so iteration was terminated.-2: The maximum number of iterations was reached.-3: A non-finite value was encountered.-4: Iteration was terminated by callback.1: The algorithm is proceeding normally (in callback only).
- dffloat array
The derivative of f at x, if the algorithm terminated successfully.
- errorfloat array
An estimate of the error: the magnitude of the difference between the current estimate of the derivative and the estimate in the previous iteration.
- nitint array
The number of iterations of the algorithm that were performed.
- nfevint array
The number of points at which f was evaluated.
- xfloat array
The value at which the derivative of f was evaluated (after broadcasting with args and step_direction).
Notes
The implementation was inspired by jacobi [1], numdifftools [2], and DERIVEST [3], but the implementation follows the theory of Taylor series more straightforwardly (and arguably naively so). In the first iteration, the derivative is estimated using a finite difference formula of order order with maximum step size initial_step. Each subsequent iteration, the maximum step size is reduced by step_factor, and the derivative is estimated again until a termination condition is reached. The error estimate is the magnitude of the difference between the current derivative approximation and that of the previous iteration.
The stencils of the finite difference formulae are designed such that abscissae are “nested”: after f is evaluated at
order + 1points in the first iteration, f is evaluated at only two new points in each subsequent iteration;order - 1previously evaluated function values required by the finite difference formula are reused, and two function values (evaluations at the points furthest from x) are unused.Step sizes are absolute. When the step size is small relative to the magnitude of x, precision is lost; for example, if x is
1e20, the default initial step size of0.5cannot be resolved. Accordingly, consider using larger initial step sizes for large magnitudes of x.The default tolerances are challenging to satisfy at points where the true derivative is exactly zero. If the derivative may be exactly zero, consider specifying an absolute tolerance (e.g.
atol=1e-12) to improve convergence.Array API Standard Support
derivativehas experimental support for Python Array API Standard compatible backends in addition to NumPy. Please consider testing these features by setting an environment variableSCIPY_ARRAY_API=1and providing CuPy, PyTorch, JAX, or Dask arrays as array arguments. The following combinations of backend and device (or other capability) are supported.Library
CPU
GPU
NumPy
✅
n/a
CuPy
n/a
✅
PyTorch
✅
✅
JAX
⚠️ no JIT
⚠️ no JIT
Dask
⛔
n/a
See Support for the array API standard for more information.
References
[1]Hans Dembinski (@HDembinski). jacobi. HDembinski/jacobi
[2]Per A. Brodtkorb and John D’Errico. numdifftools. https://numdifftools.readthedocs.io/en/latest/
[3]John D’Errico. DERIVEST: Adaptive Robust Numerical Differentiation. https://www.mathworks.com/matlabcentral/fileexchange/13490-adaptive-robust-numerical-differentiation
[4]Numerical Differentition. Wikipedia. https://en.wikipedia.org/wiki/Numerical_differentiation
Examples
Evaluate the derivative of
np.expat several pointsx.>>> import numpy as np >>> from scipy.differentiate import derivative >>> f = np.exp >>> df = np.exp # true derivative >>> x = np.linspace(1, 2, 5) >>> res = derivative(f, x) >>> res.df # approximation of the derivative array([2.71828183, 3.49034296, 4.48168907, 5.75460268, 7.3890561 ]) >>> res.error # estimate of the error array([7.13740178e-12, 9.16600129e-12, 1.17594823e-11, 1.51061386e-11, 1.94262384e-11]) >>> abs(res.df - df(x)) # true error array([2.53130850e-14, 3.55271368e-14, 5.77315973e-14, 5.59552404e-14, 6.92779167e-14])
Show the convergence of the approximation as the step size is reduced. Each iteration, the step size is reduced by step_factor, so for sufficiently small initial step, each iteration reduces the error by a factor of
1/step_factor**orderuntil finite precision arithmetic inhibits further improvement.>>> import matplotlib.pyplot as plt >>> iter = list(range(1, 12)) # maximum iterations >>> hfac = 2 # step size reduction per iteration >>> hdir = [-1, 0, 1] # compare left-, central-, and right- steps >>> order = 4 # order of differentiation formula >>> x = 1 >>> ref = df(x) >>> errors = [] # true error >>> for i in iter: ... res = derivative(f, x, maxiter=i, step_factor=hfac, ... step_direction=hdir, order=order, ... # prevent early termination ... tolerances=dict(atol=0, rtol=0)) ... errors.append(abs(res.df - ref)) >>> errors = np.array(errors) >>> plt.semilogy(iter, errors[:, 0], label='left differences') >>> plt.semilogy(iter, errors[:, 1], label='central differences') >>> plt.semilogy(iter, errors[:, 2], label='right differences') >>> plt.xlabel('iteration') >>> plt.ylabel('error') >>> plt.legend() >>> plt.show()
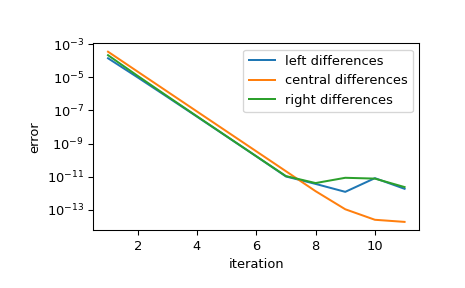
>>> (errors[1, 1] / errors[0, 1], 1 / hfac**order) (0.06215223140159822, 0.0625)
The implementation is vectorized over x, step_direction, and args. The function is evaluated once before the first iteration to perform input validation and standardization, and once per iteration thereafter.
>>> def f(x, p): ... f.nit += 1 ... return x**p >>> f.nit = 0 >>> def df(x, p): ... return p*x**(p-1) >>> x = np.arange(1, 5) >>> p = np.arange(1, 6).reshape((-1, 1)) >>> hdir = np.arange(-1, 2).reshape((-1, 1, 1)) >>> res = derivative(f, x, args=(p,), step_direction=hdir, maxiter=1) >>> np.allclose(res.df, df(x, p)) True >>> res.df.shape (3, 5, 4) >>> f.nit 2
By default, preserve_shape is False, and therefore the callable f may be called with arrays of any broadcastable shapes. For example:
>>> shapes = [] >>> def f(x, c): ... shape = np.broadcast_shapes(x.shape, c.shape) ... shapes.append(shape) ... return np.sin(c*x) >>> >>> c = [1, 5, 10, 20] >>> res = derivative(f, 0, args=(c,)) >>> shapes [(4,), (4, 8), (4, 2), (3, 2), (2, 2), (1, 2)]
To understand where these shapes are coming from - and to better understand how
derivativecomputes accurate results - note that higher values ofccorrespond with higher frequency sinusoids. The higher frequency sinusoids make the function’s derivative change faster, so more function evaluations are required to achieve the target accuracy:>>> res.nfev array([11, 13, 15, 17], dtype=int32)
The initial
shape,(4,), corresponds with evaluating the function at a single abscissa and all four frequencies; this is used for input validation and to determine the size and dtype of the arrays that store results. The next shape corresponds with evaluating the function at an initial grid of abscissae and all four frequencies. Successive calls to the function evaluate the function at two more abscissae, increasing the effective order of the approximation by two. However, in later function evaluations, the function is evaluated at fewer frequencies because the corresponding derivative has already converged to the required tolerance. This saves function evaluations to improve performance, but it requires the function to accept arguments of any shape.“Vector-valued” functions are unlikely to satisfy this requirement. For example, consider
>>> def f(x): ... return [x, np.sin(3*x), x+np.sin(10*x), np.sin(20*x)*(x-1)**2]
This integrand is not compatible with
derivativeas written; for instance, the shape of the output will not be the same as the shape ofx. Such a function could be converted to a compatible form with the introduction of additional parameters, but this would be inconvenient. In such cases, a simpler solution would be to use preserve_shape.>>> shapes = [] >>> def f(x): ... shapes.append(x.shape) ... x0, x1, x2, x3 = x ... return [x0, np.sin(3*x1), x2+np.sin(10*x2), np.sin(20*x3)*(x3-1)**2] >>> >>> x = np.zeros(4) >>> res = derivative(f, x, preserve_shape=True) >>> shapes [(4,), (4, 8), (4, 2), (4, 2), (4, 2), (4, 2)]
Here, the shape of
xis(4,). Withpreserve_shape=True, the function may be called with argumentxof shape(4,)or(4, n), and this is what we observe.